Overview
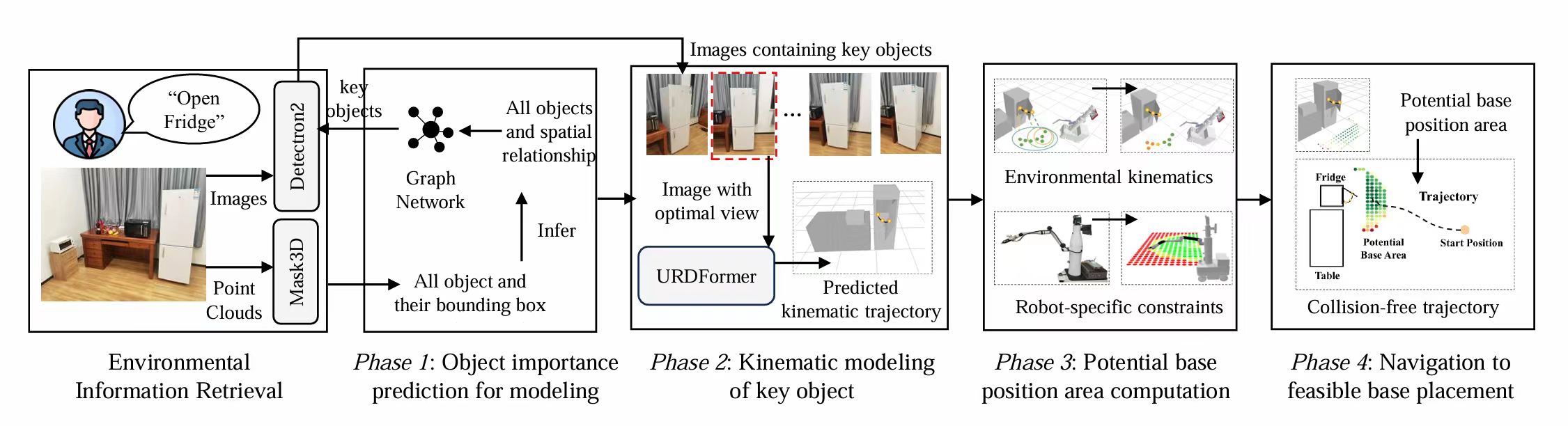
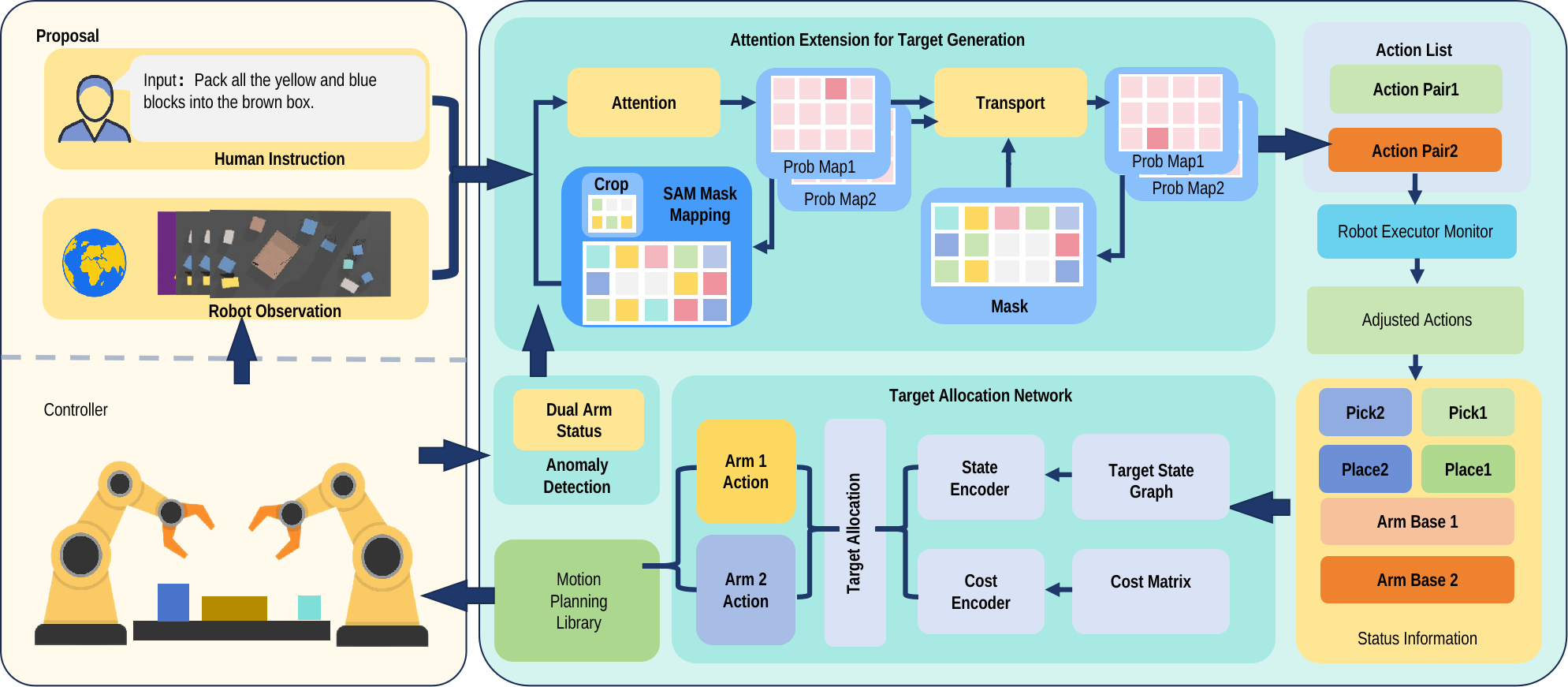
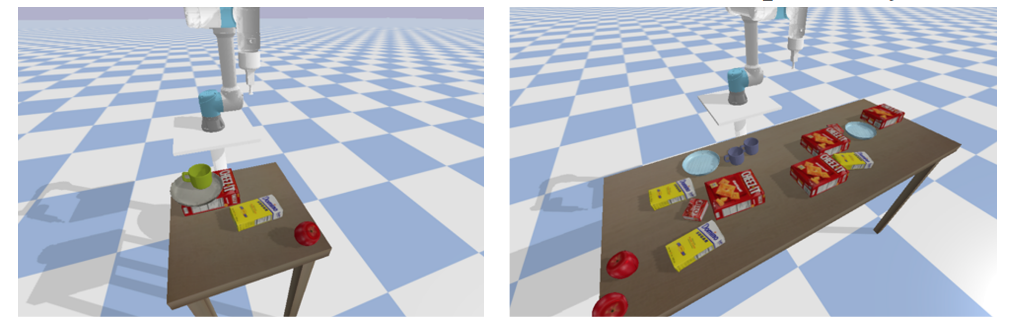
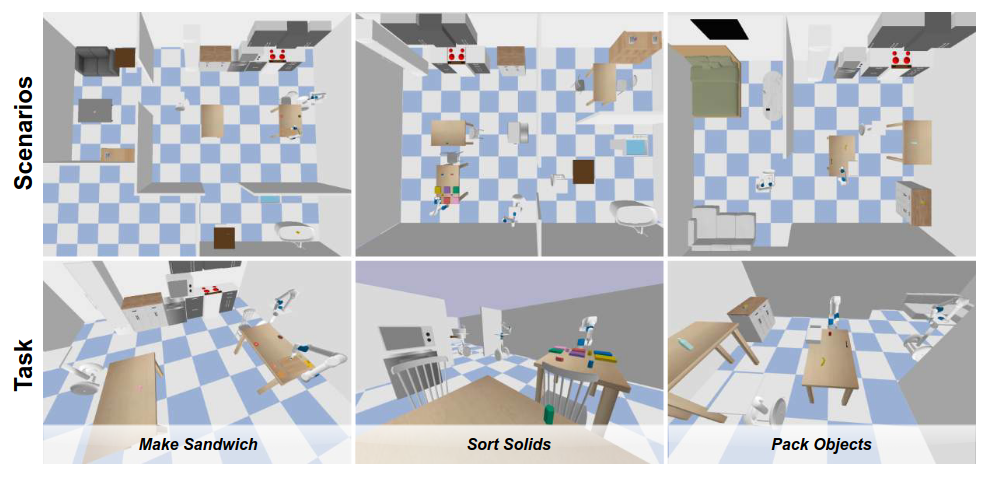
Currently, a series of research and development efforts have been carried out based on the BestMan platform, encompassing autonomous navigation, object grasping and manipulation, integration with Large Language Models (LLM), and dual-arm coordination tasks.
These works further demonstrate the platform's robust adaptability and extendability in handling various tasks and scenarios. In the future, the platform will continue to be refined, exploring its potential across a wider range of application domains.